Two problems of three equilateral triangle




Trung sĩ
Two problems of three equilateral triangle
Trung sĩ
Đã chứng minh! Hơi dài nên chưa gõ lên đây được.
Bạn chứng minh được bài đó thì quar là bái phục mong bạn post lên cho anh em xem. thanks.
Hạ sĩ
Ta đặt hệ trục toạ độ $Oxy$ trong mặt phẳng và $z = x+\sqrt{-1}y$. Khi đó, mỗi điểm $P$ trong mặt phẳng có toạ độ $z = z(P) =(x(P),y(P)) \in \mathbb{C}$. Viết $\vec{P} = \vec{OP}$ là vec-tơ với đầu tại $O$ và cuối tại $P$. Vậy thì với hai điểm $E$ và $F$ ta có
$$\vec{EF} = \vec{F} - \vec{E} = z(F) -z(E).$$
Vậy $\vec{EF}$ có toạ độ là số phức $z(F) -z(E)$. Ta sẽ đồng nhất một vec-tơ với toạ độ của nó. Vậy thì, $\vec{EF}$ có thể xem là một số phức.
Đặt $\omega = e^{2i\pi/3}$ là số phức có modulus $1$ và argument $2\pi/3$. Nó cho phép biểu diễn phép quay góc $2\pi/3$ như sau: Nếu $D,E,F$ là ba điểm thoả mãn
$$\omega\vec{DE} = \vec{DF}$$
thì $F$ là ảnh của $E$ qua phép quay tâm $D$ với góc quay $2\pi/3$. Mặt khác, ta biết các căn bậc ba của $1$ là
$$\sqrt{1} = \{w_1=1,w_2=\omega, w_3=\omega^2\}$$
và các điểm với toạ độ tương ứng tạo thành ba đỉnh của tam giác đều.
Giả sử tâm của tam giác đều $A_1A_2A_3$ là $A_0$ và $a = z(A_0)$ là toạ độ của nó. Khi đó, có số phức $r\in \mathbb{C}$ sao cho
$$z(A_1) = a+r w_1, \quad z(A_2) = a+rw_2, \quad z(A_3) = a+rw_3.$$
Tương tự như vậy, ta có
$$z(B_k) = b+sw_k, \quad z(C_k) = c+tw_k, \quad k=1,2,3.$$
Gọi $Q$ là tâm của tam giác $A_3B_3C_3$. Khi đó
$$z(Q) = \frac{z(A_3)+z(B_3)+z(C_3)}{3} = \frac{a+b+c}{3} + \frac{r+s+t}{3}w_3.$$
Để đơn giản, ta có thể giả sử $a+b+c = 0$ và vậy thì
$$z(Q) = \frac{r+s+t}{3}w_3.$$
Vì tam giác $A_3B_3C_3$ là tam giác đều với tâm $Q$ nên $B_3$ là ảnh của $A_3$ qua phép quay tâm $Q$ góc $2\pi/3$ ... Nói cách khác, ta có các đẳng thức sau:
$$\omega\vec{QA_3} = \vec{QB_3}, \quad \omega\vec{QB_3} = \vec{QC_3}, \quad \omega\vec{QC_3} = \vec{QA_3}.$$
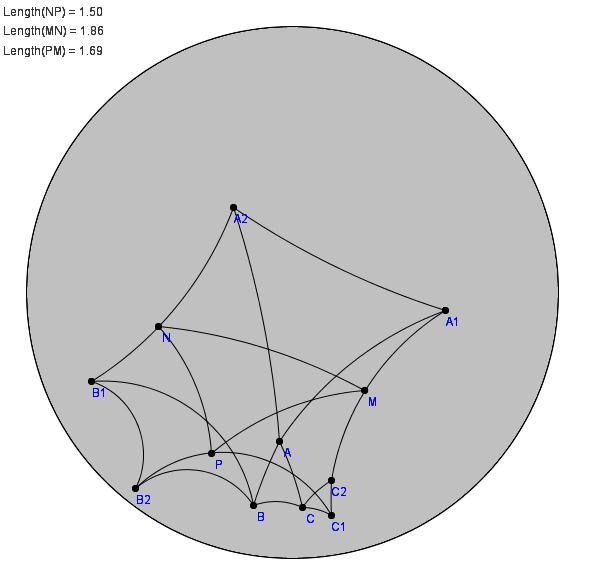
Vì $M$ là trung điểm của $C_2A_1$ nên (cùng với $a+c = -b$)
$$z(M) = \frac{z(C_2)+z(A_1)}{2} = \frac{1}{2}\left(c+a+tw_2+rw_1\right) = \frac{1}{2}\left(-b+tw_2+rw_1\right).$$
Tương tự như vậy, ta có thể tính toán được $z(N), z(P)$.
Gọi $G$ điểm có tọa độ
$$z(G) = -\frac{r+s+t}{6}w_3.$$
Khi đó
$$\vec{GM} = \vec{M} - \vec{G} = z(M) - z(G) = \frac{1}{2}\left(-b+tw_2+rw_1\right)+ \frac{r+s+t}{6}w_3.\tag{1}$$
Thu gọn vế phải của đẳng thức (1) ta được
$$\vec{GM} = \frac{1}{2}\left(-b -sw_3 + \frac{r+s+t}{3}w_3 + tw_2+rw_1 +sw_3\right) = \frac{1}{2}\left(-\vec{QB_3} + tw_2+rw_1 +sw_3\right)$$
Ở đây, ta dùng
$$\vec{QB_3} = z(B_3) - z(Q) = b+sw_3 - \frac{r+s+t}{3}w_3.$$
Từ đó, thực hiện phép quay tâm $G$, góc $2\pi/3$ (tức là nhân với $\omega$)
$$\omega\vec{GM} = \frac{1}{2}\left(-\omega\vec{QB_3} + t\omega w_2+r\omega w_1 +s\omega w_3\right) = \frac{1}{2}\left(-\vec{QC_3} +tw_3+rw_2 +sw_1\right)$$
Ở đây, ta dùng
$$\omega\vec{QB_3} = \vec{QC_3}, \quad \omega w_1 = w_2, \quad \omega w_2 = w_3, \quad \omega w_3 = w_1.$$
Mặt khác, tính toán tương tự như (1) đối với điểm $N$, ta được
$$\vec{GN} = \frac{1}{2}\left(-\vec{QC_3} +tw_3+rw_2 +sw_1\right)$$
Vậy
$$\omega\vec{GM} = \vec{GN}.$$
Từ đây suy ra $N$ là ảnh của $M$ qua phép quay tâm $G$, góc quay $2\pi/3$. Hoàn toàn tương tự, ta cũng chứng minh $P$ là ảnh của $N$ qua phép quay này. Từ đó $\Delta MNP$ là tam giác đều.
Trung sĩ
Ta đặt hệ trục toạ độ $Oxy$ trong mặt phẳng và $z = x+\sqrt{-1}y$. Khi đó, mỗi điểm $P$ trong mặt phẳng có toạ độ $z = z(P) =(x(P),y(P)) \in \mathbb{C}$. Viết $\vec{P} = \vec{OP}$ là vec-tơ với đầu tại $O$ và cuối tại $P$. Vậy thì với hai điểm $E$ và $F$ ta có
$$\vec{EF} = \vec{F} - \vec{E} = z(F) -z(E).$$
Vậy $\vec{EF}$ có toạ độ là số phức $z(F) -z(E)$. Ta sẽ đồng nhất một vec-tơ với toạ độ của nó. Vậy thì, $\vec{EF}$ có thể xem là một số phức.
Đặt $\omega = e^{2i\pi/3}$ là số phức có modulus $1$ và argument $2\pi/3$. Nó cho phép biểu diễn phép quay góc $2\pi/3$ như sau: Nếu $D,E,F$ là ba điểm thoả mãn
$$\omega\vec{DE} = \vec{DF}$$
thì $F$ là ảnh của $E$ qua phép quay tâm $D$ với góc quay $2\pi/3$. Mặt khác, ta biết các căn bậc ba của $1$ là
$$\sqrt{1} = \{w_1=1,w_2=\omega, w_3=\omega^2\}$$
và các điểm với toạ độ tương ứng tạo thành ba đỉnh của tam giác đều.
Giả sử tâm của tam giác đều $A_1A_2A_3$ là $A_0$ và $a = z(A_0)$ là toạ độ của nó. Khi đó, có số phức $r\in \mathbb{C}$ sao cho
$$z(A_1) = a+r w_1, \quad z(A_2) = a+rw_2, \quad z(A_3) = a+rw_3.$$
Tương tự như vậy, ta có
$$z(B_k) = b+sw_k, \quad z(C_k) = c+tw_k, \quad k=1,2,3.$$
Gọi $Q$ là tâm của tam giác $A_3B_3C_3$. Khi đó
$$z(Q) = \frac{z(A_3)+z(B_3)+z(C_3)}{3} = \frac{a+b+c}{3} + \frac{r+s+t}{3}w_3.$$
Để đơn giản, ta có thể giả sử $a+b+c = 0$ và vậy thì
$$z(Q) = \frac{r+s+t}{3}w_3.$$
Vì tam giác $A_3B_3C_3$ là tam giác đều với tâm $Q$ nên $B_3$ là ảnh của $A_3$ qua phép quay tâm $Q$ góc $2\pi/3$ ... Nói cách khác, ta có các đẳng thức sau:
$$\omega\vec{QA_3} = \vec{QB_3}, \quad \omega\vec{QB_3} = \vec{QC_3}, \quad \omega\vec{QC_3} = \vec{QA_3}.$$
Vì $M$ là trung điểm của $C_2A_1$ nên (cùng với $a+c = -b$)
$$z(M) = \frac{z(C_2)+z(A_1)}{2} = \frac{1}{2}\left(c+a+tw_2+rw_1\right) = \frac{1}{2}\left(-b+tw_2+rw_1\right).$$
Tương tự như vậy, ta có thể tính toán được $z(N), z(P)$.
Gọi $G$ điểm có tọa độ
$$z(G) = -\frac{r+s+t}{6}w_3.$$
Khi đó
$$\vec{GM} = \vec{M} - \vec{G} = z(M) - z(G) = \frac{1}{2}\left(-b+tw_2+rw_1\right)+ \frac{r+s+t}{6}w_3.\tag{1}$$
Thu gọn vế phải của đẳng thức (1) ta được
$$\vec{GM} = \frac{1}{2}\left(-b -sw_3 + \frac{r+s+t}{3}w_3 + tw_2+rw_1 +sw_3\right) = \frac{1}{2}\left(-\vec{QB_3} + tw_2+rw_1 +sw_3\right)$$
Ở đây, ta dùng
$$\vec{QB_3} = z(B_3) - z(Q) = b+sw_3 - \frac{r+s+t}{3}w_3.$$
Từ đó, thực hiện phép quay tâm $G$, góc $2\pi/3$ (tức là nhân với $\omega$)
$$\omega\vec{GM} = \frac{1}{2}\left(-\omega\vec{QB_3} + t\omega w_2+r\omega w_1 +s\omega w_3\right) = \frac{1}{2}\left(-\vec{QC_3} +tw_3+rw_2 +sw_1\right)$$
Ở đây, ta dùng
$$\omega\vec{QB_3} = \vec{QC_3}, \quad \omega w_1 = w_2, \quad \omega w_2 = w_3, \quad \omega w_3 = w_1.$$
Mặt khác, tính toán tương tự như (1) đối với điểm $N$, ta được
$$\vec{GN} = \frac{1}{2}\left(-\vec{QC_3} +tw_3+rw_2 +sw_1\right)$$
Vậy
$$\omega\vec{GM} = \vec{GN}.$$
Từ đây suy ra $N$ là ảnh của $M$ qua phép quay tâm $G$, góc quay $2\pi/3$. Hoàn toàn tương tự, ta cũng chứng minh $P$ là ảnh của $N$ qua phép quay này. Từ đó $\Delta MNP$ là tam giác đều.
I'm sorry, my english is bad but unikey of I is error. Thank you verry much
I posted it, later I discovered it mentioned this http://www.cut-the-k...imilarity.shtml
Although we have problem 2.
Hạ sĩ
I'm sorry, my english is bad but unikey of I is error. Thank you verry much
I posted it, later I discovered it mentioned this http://www.cut-the-k...imilarity.shtml
Although we have problem 2.
Tôi có hai ý nhỏ sau:
Với các kí hiệu trong Bài toán 1. Gọi $H$ là trọng tâm của tam giác với các đỉnh là tâm của các tam giác $\Delta A_1A_2A_3$, $\Delta B_1B_2B_3$ và $\Delta C_1C_2C_3$. Khi đó $H,Q$ và $G$ thẳng hàng. Hơn nữa, $H$ nằm giữa $G$ và $Q$ và $HG:HQ = 1:2$.
Câu hỏi đặt ra là tính thẳng hàng này còn đúng trong trường hợp tổng quát của 3 tam giác đồng dạng như nói trong link phía trên? Bạn thử nghiên cứu vấn đề này xem, có thể đó là một bài toán mới.
Tôi thấy câu hỏi trong mục hai rất thú vị. Nếu bạn trả lời được, xin hãy chia sẻ ở đây.

0 thành viên, 1 khách, 0 thành viên ẩn danh

Community Forum Software by IP.Board
Licensed to: Diễn đàn Toán học